约束优化(constrained optimization)相关理论
概念
对于一个约束优化问题,通常建模为:
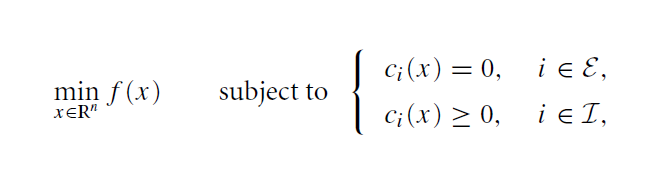
通常 f(x) 是光滑的实值函数。\mathcal{E} 代表等号约束的有限集合,\mathcal{I} 是不等式约束的优先集合。用 \Omega 代表可行域。
紧凑的写法就是: $$ \min_{x\in\Omega} f(x) $$
回顾,对于非约束优化问题的条件:
necessary condition 必要条件:局部极小值点有 一阶导数为零,二阶导数半正定;
必要条件就是解必须满足的条件。
sufficient condition 充分条件:所有点满足一阶导数为零,二阶导数是整数的点是函数的局部极小值点。
充分条件就是:如果x满足该条件,那么x就是解。
局部解:
严格局部解:
隔离局部解:
情况1:一个等号约束
对于这样的问题:
$$\min x_1+x_2\ s.t. x_1^2+x_2^2=2 $$
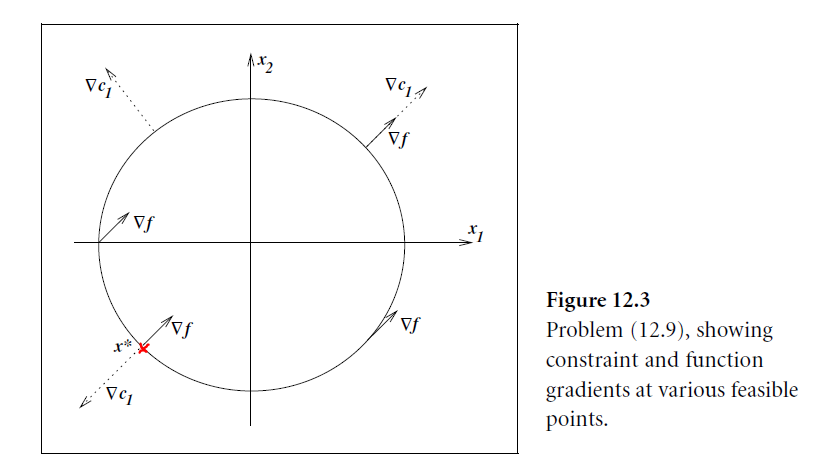
x^* 点(红色)是最优解,可以发现在这个圆上,除了x^* 以外所有的点都可以找到一个路径,减小 f 的同时,保持可行。
同时可以发现,x^* 点(红色)的约束法线 \nabla c_{1}\left(x^{*}\right) 是平行于梯度 \nabla f(x^*) 的,所以存在一个系数使得:
下面使用一节泰勒展开推导上式:
对于 c_{1}\left(x\right)=0 , 有一个微小的步长s,满足c_1(x+s)=0,写为: $$ 0=c_1(x+s)\approx c_1(x)+ \nabla c_1(x)^Ts=\nabla c_1(x)^Ts $$ 所以可以说,如果说微小步长 s 满足 c_1 的可行性,在一阶情况下,满足条件: $$ \nabla c_1(x)^Ts=0 $$ 同样的,对于 f(x) 来说,我们希望步长s使得 f(x) 减小,所以: $$ 0>f(x+s)-f(x)\approx \nabla f(x)^Ts $$ 所以说对于上面两个条件:
- \nabla c_1(x)^Ts=0
- 0> \nabla f(x)^Ts
这两个条件满足-->存在微小步长s--->那么就存在一个方向d,d \approx s/||s|| 满足上面两个条件:
\nabla c_1(x)^Td=0 并且0> \nabla f(x)^Td 。
反而言之,如果说这个d不存在,那么我们就在x附近找不到比它小的数值,说明x是局部最小。
通过画图可以发现,当\nabla c(x) 和 \nabla f(x) 平行的时候,也就是\nabla c(x)=\lambda \nabla f(x),我们是找不到满足条件的 d。
引入拉格朗日函数: $$ \mathcal{L}\left(x, \lambda_{1}\right)=f(x)-\lambda_{1} c_{1}(x) $$ 导数为: $$ \nabla_{x} \mathcal{L}\left(x, \lambda_{1}\right)=\nabla f(x)-\lambda_{1} \nabla c_{1}(x) $$ 若存在乘子 \lambda_{1}^* 使得 \nabla_{x} \mathcal{L}\left(x, \lambda_{1}\right)=0,则 \nabla f(x)=\lambda c(x)。这样一来,我们可以将等号约束的问题转化为寻找拉格朗日函数的驻点问题。\lambda 为拉格朗日乘子。
显然,\nabla c(x)=\lambda \nabla f(x) 这个条件只能是一个必要条件,不能说是充分条件。
情况2:一个不等号约束
对于这样的不等号约束问题: $$ \min x_1+x_2\ s.t. x_1^2+x_2^2<=2 $$ 将情况1的圆环转化为了一个圆的内部与环。
对于这个问题,依旧可以知道x^*=(-1,-1)^T,\lambda =1/2 。
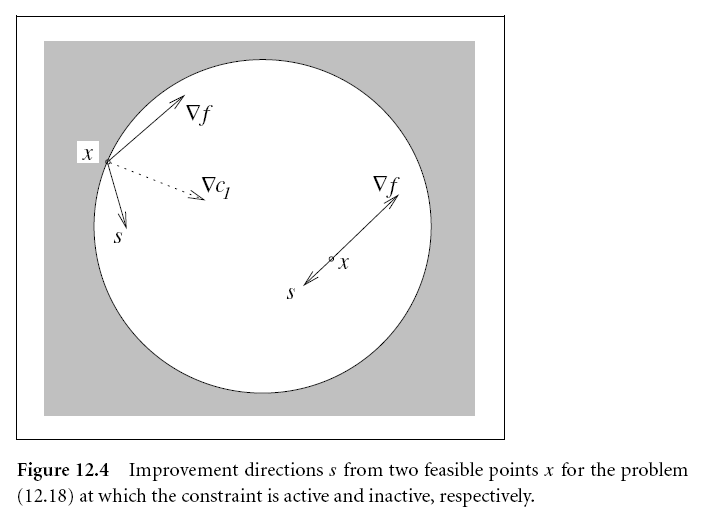
对于不等式约束,我们希望x附件比当前c(x)大,或者相等: $$ 0 \geq c(x+s) \approx c(x)+ \nabla c(x)^Ts $$ 所以在一阶情况写为: $$ c(x)+ \nabla c(x)^Ts \geq 0 $$ 第二个条件和情况1一样,写为: $$ 0> \nabla f(x)^Ts $$ 如果说 x严格位于圆的内部,也就是说 c(x)>0。那么任何方向上的步长都能满足c(x)+ \nabla c(x)^Ts \geq 0 ,只要它足够短。
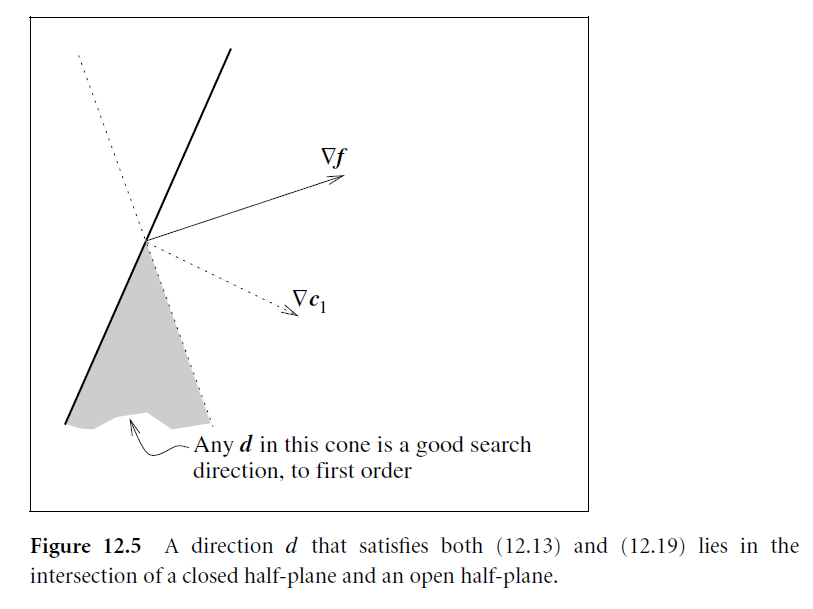
如果说x位于圆环上,那么就和情况1讨论的一样。只要 \nabla c(x) 和 \nabla f(x) 不平行,就能找到一个方向d进行搜索。如下图所示,两者不平行,灰色区域都是可以搜索的空间,满足两个条件。
总结成拉格朗日函数形式:
\lambda^* c(x^*)=0 这也被称之为互补松弛条件:
当c(x)>0的时候(约束不起作用),\lambda 为0,也就是说只需要满足\nabla f(x)=0 这一个条件。
当c(x)=0的时候,约束发挥作用,类比于情况一,要满足两个条件。
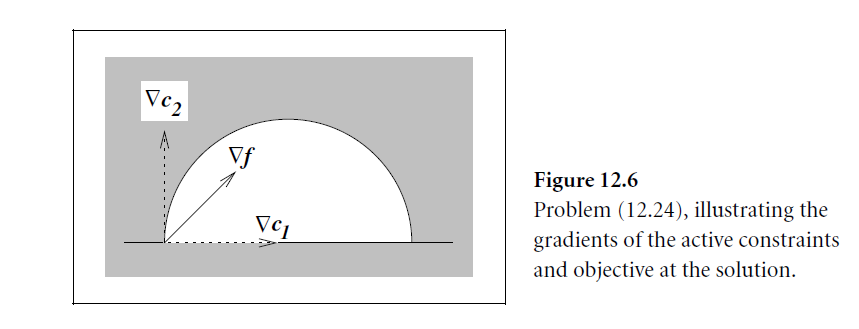
情况3:两个不等号约束
问题转化为一个半圆,如图所示:
条件写为:
互补松弛条件:
找一些点进行检查: x=(\sqrt 2,0)^T,可以找到 d=(-1,0)^T
x=(1,0)^T,可以找到 d=(-1/2,1/4)^T
x=(-\sqrt 2,0)^T,满足条件,\lambda^*=(1/2 \sqrt2,1)^T, 是一个极值点。
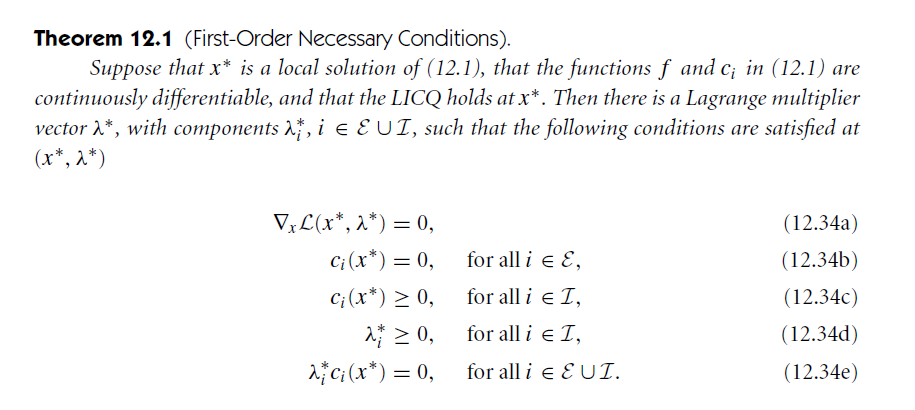
一阶最优条件,KKT条件
定义拉格朗日函数: $$ \mathcal{L}(x, \lambda)=f(x)-\sum_{i \in \mathcal{E} \cup \mathcal{I}} \lambda_{i} c_{i}(x) $$ 一阶必要条件: